Статьи
Розрахунок кута місця для супутника. Як визначити азимут
- Що таке магнітний азимут
- Як визначити азимут по карті і компасу
- Як визначити азимут - рух по азимуту
- Як визначити азимут - орієнтири
- Знаходження значень и робота з Набутів параметрами
- Застосування даних азимута в сфері супутникових антен
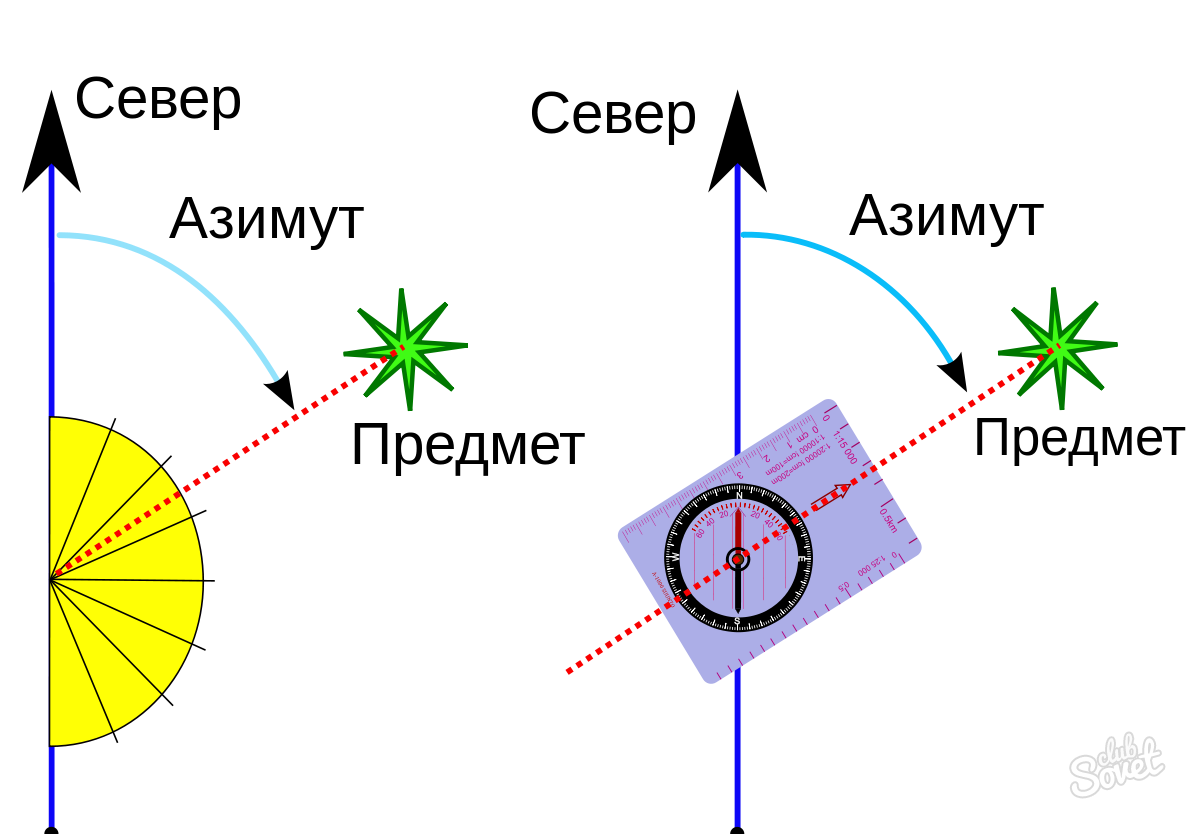
Орієнтування - це встановлення своїх координат на карті. Найчастіше визначається за допомогою компаса і карти. При достатніх знаннях - за зірками, сонцем, підручних засобів (годинах, саморобним компасах). Азимут - це кут між північчю, і точкою на карті. Визначення азимута знадобиться в навичках орієнтування на місцевості. Особливо це вміння може бути актуально в піших, велопоходах по горах, лісах, а також в різних екстремальних ситуаціях.
Коли доступна високоточна цифрова модель рельєфу, як інтерферометрична фазова складова, викликана кривизною Землі, так і обумовлена топографією землі, може бути усунена одночасно. На основі цієї моделі генерується синтетична інтерферограмма, яка потім знижується з фільтрованої інтерферограмми. Різні атмосферні умови між двома злетами роблять помітний вплив на інтерферометричної фазу. Як правило, цей ефект обмежений в межах 2-точкового діапазону. Атмосферне ефект впливає як на визначення висоти, так і на деформацію грунту.
Що таке магнітний азимут
Це певний кут між знайденим північчю на карті, компас і точкою маршруту в яку потрібно прийти. Магнітний азимут завжди визначається за годинниковою стрілкою компаса. Для того, щоб компас дав правильні свідчення, треба відійти на максимальну відстань від магнітних предметів, які можуть дати невірні показання півночі, тобто спочатку неправильно задати маршрут.
Ефекти, викликані атмосферою, повинні бути видалені з інтерферограмми, щоб не приводити до помилкових інтерпретацій результатів, отриманих з неї. Шум інтерферометричної фази усувається шляхом застосування деяких. адаптивних фільтрів і компресії інтерферограмми.
Кроки для створення цифрової моделі рельєфу. По-перше, наближена реєстрація зображення виконується на основі параметрів орбіти. На другому етапі точна реєстрація субпикселей виконується шляхом автоматичної ідентифікації точок з'єднання на двох зображеннях. Якщо точні ефемериди супутникової платформи недоступні, то ви повинні. виміряв кілька опорних точок з високою точністю. Інтерферограмма синтезу генерується з використанням цифрової моделі місцевості. і параметри орбіти. Іншими словами, на цьому етапі оцінюється складова інтерферометричної фази, викликана топографією ландшафту.
Як визначити азимут по карті і компасу
- Для того, щоб визначити азимут знадобиться справний компас і карта місцевості.
- Азимут охоплює всі 360 градусів на відмітках компаса за годинниковою стрілкою.
- Для початку потрібно вибрати правильний напрямок по якому буде відбуватися рух. По ньому вирахувати кут азимута.
- Людина стає особою у напрямку орієнтира. Тримає карту і компас перед собою.
- Стрілка компаса тримається на гальмі. Слід відпустити це гальмо, щоб намагнічена стрілка самостійно знайшла північний полюс. Не рекомендується стояти поблизу залізних споруд, або мати на собі залізні предмети, під час роботи з компасом. Є велика ймовірність, що стрілка компаса дасть неправильні показання.
- Компас лежить на карті, і його позначки півночі збігаються з відмітками карти.
- Встановлюється своє місце розташування і обраного орієнтира.
- Далі використовується візир. З його допомогою на компасі фіксується потрібний напрямок, якого слід дотримуватися.
- Кут між стрілкою, що вказує на північ і точкою орієнтиру буде називатися азимутом.
- Дуже зручним і більш правильним буде компас з вбудованою лінійкою і фіксатором обраного напрямку.
- Визначення маршруту може коливатися в точності.
Після обчислення інтерферограмми відбувається стиснення, щоб зменшити шум інтерферометричної фази. Наступним кроком буде проведення фази, яка є найскладнішою стадією інтерферометричної обробки і є предметом досліджень в науковому співтоваристві, оскільки до цих пір не був розроблений алгоритм. пропонують одноголосно прийняте рішення. На закінчення, в деяких випадках, необхідно відредагувати фази, які були неправильно виконані. Абсолютну інтерферометричної фазу отримують шляхом додавання синтетичної фази інтерферограмми до розгорнутої фазі. для кожного пікселя складної інтерферограмми.
Як визначити азимут - рух по азимуту
- Для цього потрібно оглянути обрану місцевість проходить по маршруту. Визначити, як правильніше можна рухатися, щоб не випустити з уваги орієнтири. Можливо варто зробити невелику розвідку.
- Для зручності робиться нежирної пунктирною лінією розмітка маршруту на карті.
- На окремому листку паперу відзначається прогрес руху.
- Коли рух досягло черговий позначки, слід вибрати наступний орієнтир, і також зробити позначки на листку прогресу.
- Показання компаса час від часу збиваються. Не потрібно забувати оновлювати налаштування компаса дійшовши до точки.

Після цього кроку корекція перпендикулярної приймальні бази проводиться на основі виміряних опорних точок. на етапі реєстрації. Все інтерферограмми, створені до цього моменту, перераховуються з використанням скоригованого значення перпендикулярної бази збору. На наступному кроці абсолютна інтерферометрична фаза кожного пікселя перетвориться в висоту. Нарешті, цифрова модель рельєфу інтерполюється для отримання топографічної поверхні, представленої кінцевими поверхневими елементами квадратної форми.
Вимірювання опорних точок. Генерація синтетичної інтерферограмми. Розрахунок комплексної інтерферограмми. Розрахунок диференційної інтерферограмми. Фільтрувати інтерферограмма. Лазерне сканування Лазерне сканування - це метод збору геометричної інформації про форму та місцезнаходження об'єктів, місцевості або навколишнього середовища в цілому. Зібрані дані потім можуть бути використані для створення цифрових моделей. тривимірний вигляд сканованого об'єктива. Технології наземного сканування є предметом дивовижних подій за останні десятиліття, стаючи однозначно одним з найважливіших способів. збір геопросторових даних.
Як визначити азимут - орієнтири
Нараховуються три види орієнтирів: точкові, лінійні і майданні. На роль точкових орієнтирів підійдуть дуже помітні самотньо стоять дерева, стовпи, вітряні млини. Точка постійно статична, без переміщення. Якщо йдеться про більш масштабному орієнтуванні, то це можуть бути населені пункти , Ліси, озера, такі орієнтири називаються площадковими. Існують ще лінійні орієнтири - дороги, гаї, ліси, що йдуть в довжину, а не в ширину.
Їх застосування варіюється від простого моделювання більших чи менших об'єктів до складних досліджень деформацій певних цілей і реалізації цифрових ландшафтів або моделей поверхні для великих площ. Результат сканування зазвичай представлений дискретним набором точок, що належать до відсканованої лінзі, положення якої щодо геометричного центру інструменту. певної в полярній системі координат скануючого приладу. Набір очок підрахунку відомий в літературі як «хмарні точки».
Це сама назва передбачає щільність інформації, використовуваної для моделювання мети. головна перевага цих інструментів. Різниця між двома технологіями - використовувана довжина хвилі; в разі останнього. Спочатку використовуваний під час Другої світової війни, радар став корисним інструментом для багатьох. цивільних застосувань. На початку 1970-х років з'явилися перші системи сканування, що використовуються на платформах. але через відсутність рішень для прямої геоприв'язки отриманих даних додатка цих систем були підведені до досліджень атмосфери. океани, льодовики і т.д. модель землекористування, яка не може бути досягнута в той час.
Дуже важливо помітити для себе правильні орієнтири ще в денний час доби. Якщо справа наближається до вечора, краще подумати про розміщення стоянки та ночівлі. Є величезна ймовірність загубитися при переміщенні в сутінках. Підібрані орієнтири для кращого запам'ятовування відзначаються на аркуші прогресу.
Не завжди виходить продовжувати рух по прямій лінії. Тому робляться позначки всього свого можливого руху включаючи відхилення. Компас перенастраивается для кожного наступного ділянки. Схема дій в дорозі: стовп - настройка - дерево - настройка.
В області топографії та геодезії, краще в приладобудуванні, принципи. технології сканування спочатку використовувалися при розробці засобів вимірювання відстані. Починаючи з 1990-х років, після розробки глобальних систем позиціонування, інерційних навігаційних систем і математичної моделі інтеграції. спостереження з двох систем, використання скануючих систем. Повітряно-десантна модель поверхні землі стала можливою.
Малюнок 19: Бортові сканери для моделювання поверхні суші У цей час також з'явилися наземні системи сканування для промислових і топографічних застосувань, але знайшли застосування в багатьох інших областях, таких як архітектура, археологія і т.д. їх використання статично до останнього періоду в тому сенсі, що інструмент залишається фіксованим в рамках сеансу вимірювання. Лазерний промінь, який використовується для вимірювання відстані до найближчого об'єкта, орієнтований на різні чітко визначені напрямки за допомогою сервомотора. для горизонтального переміщення і відхилення його від повороту дзеркала з дуже високими вертикальними швидкостями.

Дуже важливим навиком буде правильно вказівку цілей на місцевості або карті. Це вміння особливо важливо якщо потрібно передавати дані по зв'язку (рації) для визначення свого місцезнаходження відносно іншої людини. Правильно обраний орієнтир також може допомогти змагаються знаходити потрібні ділянки, зазначені по заданому плану.
Це визначає положення, задане полярними координатами, для набору точок, зазвичай званих «хмарними точками». Якщо розміри сканованих об'єктів великі, вони скануються. використовуючи кілька зупинок, в результаті чого з'являється більше «точкових хмар», які потім «об'єднані» на основі спільних точок. Цей процес називається реєстрацією.
Зазвичай використовуються відбивачі, специфічні для діагностичного приладу. В результаті сканування хмара даних обробляється за допомогою 7-параметричного перетворення Хельмерта, щоб привести його в бажану систему відліку. Ця нова технологія усуває неефективність використовуваних систем. статично і просуває наземні мобільні системи сканування в якості лідера в області збору просторових даних. Методи визначення відстані Існують два способи визначення відстані: перший метод, відомий в літературі як «імпульсна відлуння», полягає у видачі короткого, але інтенсивного імпульсу і визначенні «часу польоту».
Стаття розкриває основні методи, як визначити азимут з використанням магнітного компаса і місця його можливого застосування. Використання азимута поширене в супутниковому телебаченні.
У сучасному світі, насиченому гаджетами і технологіями, самостійно знайти цікавить напрям за допомогою компаса і карти можуть одиниці. Уміння знайти азимут може стати в нагоді і виручити в будь-якій справі.
Таким чином, прилад точно вимірює час поширення, що минув від імпульсного виходу, до тих пір, поки він не отримає відгук відображення на сканованому об'єкті. Імпульс випускається Імпульсного відбитого відстані. Малюнок 20: Метод імпульсного луна-сигналу дистанційного зондування Таким чином, відстань між сканером і об'єкту сканування можна оцінити як рівне.
Альтернативний метод полягає в безперервному випущенні лазерного променя замість імпульсу. Визначення відстані в цьому випадку проводиться шляхом порівняння синусоїдального характеру переданої та прийнятої хвилі. Оскільки використовувані хвилі мають довжини хвиль. дуже малі, вони модулюються сигналом з довжиною. яка буде перекривати вихідну хвилю. Різниця фаз забезпечує тільки дробову довжину хвилі, загальна кількість довжин хвиль між сканером і залишилися невідомим об'єктом. Щоб усунути цю незручність, інструмент може змінити структуру сигналу моделювання і, таким чином, оцінити цей параметр.
Істинний (географічний) азимут - це двогранний кут, відрахований за годинниковою стрілкою (від 0 до 360 градусів) від північного географічного меридіана до лінії напряму.
Магнітний азимут - це кут, утворений магнітним меридіаном і заданим напрямом лінії орієнтира. Відлік ведеться за годинниковою стрілкою (від 0 до 360 градусів). Пошук кута може проводитися за допомогою компасів, бусоль. Магнітний азимут є не точним, так як стрілка компаса показує на магнітний меридіан, піддається щорічним змін.
Остаточне відстань буде визначатися в такий спосіб. Малюнок 21: Визначення відстані шляхом вимірювання різниці фаз Два описаних вище методу показують тільки відстань між приладом і сканованою точкою. Щоб отримати своє становище в тривимірній системі координат, потрібні два кута. Наземні сканери мають вбудовану систему поширення хвиль з відхиленнями на певних точних напрямках.
Як правило, ця система являє собою дзеркало або п'ятикутну призму, яка обертається з дуже високими вертикальними швидкостями. Для горизонтального кута в приладах використовується серводвигун, який обертає весь інструмент по горизонталі, так що хмара отриманих точок матиме макет, аналогічний такому на малюнку. Відстані, виміряні за допомогою відповідних кутів, є основою генерації хмар. Як можна бачити на малюнку нижче, він складається з декількох рядків, і кожен рядок складається з відносно великої кількості точок.
Магнітне відхилення - це кут різниці між істинним і магнітним меридіаном, про який було сказано раніше. Воно може бути позитивним, якщо стрілка компаса відхилена від істинного меридіана вправо, або негативним, якщо - вліво. На картах магнітне схилення вказують щодо року друку. Кожен наступний рік експлуатації надані дані піддаються коригуванню.
Кадр може містити сотні або навіть тисячі рядків в залежності від можливостей інструменту і потреб користувача. Інструменти призначені для забезпечення дуже високої щільності точок на лінії, і це робиться швидко, можливо, шляхом повороту дзеркала, з яким сканер встановлений з дуже високою швидкістю.
Пошук по азимутальної скануванню. Малюнок 22: Схематичне зображення режиму сканування для фіксованого інструменту. Відмінності між цими двома технологіями істотні з точки зору як процесу сканування, так і використовуваних технологій. Основна відмінність - це спосіб посилання на зібрані просторові дані. Положення зібраних точок визначаються полярними координатами і. повідомляється в власну систему координат сканера. Щоб мати можливість повідомляти хмара точок конкретної системі координат, в разі фіксованих наземних сканувань спеціальні спеціальні відбивачі поміщаються в простір об'єктів, положення яких визначається з точністю в обраній системі відліку.
Природно магнітне схилення для кожного регіону і району розташування різниться.
Топографічна карта місцевості використовується для різних цілей. Є універсальною картою, з наявністю максимального обсягу кількості інформації про певному регіоні. Розділяється топографічна карта паралелями (горизонтальні лінії) і меридіанами (вертикальні лінії). Карта зручна для орієнтації по компасу. Географічні дані місця містять відомості про рельєф, грунтах, водах, дорогах і інших об'єктах місцевості.
Згодом при обробці постобработки хмара точок пересилається в запитану систему. Що стосується мобільного наземного сканування, то геореференція хмари отриманих точок є набагато більш складним процесом, так як розташування геометричного центру сканера і неявно походження системи координат самого інструменту змінюється. безперервно. Тому першим кроком у вирішенні цієї проблеми є визначення траєкторії проходження інструменту. Це досягається за рахунок впровадження навігаційної системи, заснованої на супутникових і інерційних навігаційних технологіях, в несучу платформу.
Знаходження значень и робота з Набутів параметрами
- План визначення справжнього азимута (вікорістовується магнітний компас):
- Компас вірівнюється горизонтально до землі, даючі магнітної стрілкою вказаті на Північ;
- Візначається Потрібний об'єкт, на Який береться орієнтир;
- Чи не змінюючі положення, підганяється колба компаса під стрілку, так что б буква N (С) булу чітко навпроти магнітного покажчика;
- Відраховується градус по розподілам компаса, з нуля до заданої Лінії напрямку об'єкта (за годінніковою стрілкою);
- Результат - отримай магнітний азимут;
- До знайденому градусу додається або віднімається магнітне схилення даного регіону;
- І так, істинний азимут знайдений.
- Розрахунок азимута на мапі:
- Підбирається потрібний орієнтир, і відзначається на карті точкою;
- Далі, від наміченого орієнтира, проводиться суцільна лінія від початкового пункту до зазначеної місцевості;
- Від стартової точки проектується паралельна пряма лінія щодо географічного меридіана;
- Маючи дві накреслені лінії, транспортиром знаходиться кут, який буде дорівнює істинному азимуту.
Розрахунок за координатами аналогічний процесу знаходження азимута по карті. Замість зазначеного орієнтира на карті беруться координати точки, і вибудовується напрямок.
- Зворотний азимут.
Певне по компасу або карті потрібний напрямок, змінюється на сто вісімдесят градусів, отримуючи зворотний розрахунок.
Користь купується інформації:
- Один із способів отримання дзеркальних даних з протилежної точки напрямки.
- Можливість зробити точний поворот і слідувати в зворотний шлях.
Застосування даних азимута в сфері супутникових антен
Правильно проведений розрахунок азимута будь-то по карті або компасу не тільки підкаже зворотний шлях додому, але і допоможе з налаштуванням супутникової антени .
Основними параметрами наведення будуть вважатися кутові координати орієнтації осі променя антени по куту місця і, звичайно ж, азимуту. Перед установкою антени потрібно визначитися, з якого супутника буде ловитися сигнал. Координати різних супутників можна дізнатися на тематичних сайтах або в магазині придбання антени. Знаючи орбітальну позицію супутника, можна обчислити азимут і кут місця.
Кут місця - це градусна величина у вертикальній площині, що характеризує кут між горизонталлю і напрямком на супутник.
Розрахунок цієї величини виробляється з використанням спеціального транспортира, або пристроїв, в основі яких лежить робота акселерометра. Також, при наявності сучасного смартфона, з мережі інтернет можна скачати програмне забезпечення виконує виміри даних. Це обов'язково допоможе користувачеві відрегулювати антену на обраний кут.
Напрямок супутникової антени у вертикальній площині можна вибудувати завдяки компасу, провівши розрахунок зі знайденим кутом і отримавши істинний азимут (опис процесу описано раніше). Або більш точним способом - розрахунок на карті.
Теоретична частина знаходження азимута і кута місця може бути виражена в трьох формулах:
Az - азимут в градусах;
El - кут нахилу в градусах;
Lo ES - географічна довгота місцевості (північну півкулю знак - «+», південне - «-»)
Lo SAT - географічна широта місцевості (східне півкуля - «+», західне - «-»)
La ES - довгота стояння супутника (східне півкуля - «+», західне - «-»)
Після визначення правильної позиції параболічного дзеркала тарілки, на місці установки потрібно переконатися, що відсутні прямі перешкоди, що переривають прийняття інформації (даху, будинки, дерева). Наприклад, кут місця супутникової антени дорівнює двадцять градусів, перешкоди - п'ятдесят градусів, можна зробити висновок, що подібне розміщення є непридатним, так як лінії прийому перекриті, і сигнал від супутника не пройде. Логічно, що при монтажі потрібно правильно вибрати сторону будинку, де буде розміщена тарілка, тому що сектор «огляду» параболічного дзеркала встановленого на стіні не перевищує сто вісімдесят градусів. І важливо, що б азимут і кут місця супутника входили в цю зону.
Найпоширеніший варіант розміщення супутникової антени на даху будівлі. Це хороший вибір місцевості, так як присутня хороший огляд тарілки. До мінуса можна віднести велику легковажність і неможливість швидкого регулювання антени, на відміну від сусідніх до балконів стінних тарілок.
Правильно встановивши антену і забезпечивши хорошу наводку на супутник, можна домогтися високої чіткості мовлення улюблених телеканалів.
При визначенні азимута, варто:
- Покладатися можна тільки на якісні і справні компаси, дешеві китайські аналоги можуть видавати похибка до двадцяти градусів.
- Мати компаса двох видів:
- «Пальчиковий» магнітний компас.
Плюси: зручність орієнтування по місцевості, стійкість до трясці. Мінуси: незручний при роботі на карті.
- Планшетний магнітний компас.
Плюси: точний розрахунок напрямки на карті (за рахунок вбудованої лінійки), наявність збільшувальною лупи.
Мінуси: незручність використання на місцевості.
- У статті розглянуті антени з азимутально-угломестной підвіскою (приймаючі прийом з одного супутника) і їх можлива настройка по місцевості своїми руками. Для настройки полярної підвіски необхідно запросити класифікованих фахівців. Не варто братися за установку без попереднього досвіду роботи.
- Не можна перетягувати болти при установці дзеркала антени до підвісної системи. Спотворення форми параболічного дзеркала порушить сигнал передачі, і розрахунок по карті з компасом буде не настільки ефективним.
- Супутники, що знаходяться на одній лінії недалеко від встановлюваної тарілки, мають вже готовий настрій. Маючи компас, що обчислюються програми на смартфоні і спеціальні інструменти можна заміряти кут нахилу і азимут тарілки (по планці утримувача конвертера) скопіювавши його на свій зразок.
- Домогтися максимального ефекту розташування супутнікової Тарілки може прилад виміру сигналу SAT Finder. Він визначає найвигідніший поворот антени до точності в міліметр.